이번 시간에는 4채널, 6채널, 2채널, 3채널등 채널이 많고 적은 헬기의 차이점에 대해 알아보겠습니다.
그리고 6채널 헬기에 대한 이해를 조금 더 넓혀보도록 하겠습니다. ^^
우리는 RC헬기에 대해 이야기할 때,
이건 4채널 고정피치 헬기니, 저건 6채널 가변피치 모델이니, 요놈은 3채널 동축반전헬기니 등등, RC헬기가 몇채널 짜리다 라는 말을 많이 하게 됩니다.
이렇게 채널이 많고 적음에 따른 헬기의 차이점은 무엇일까요?? ^^
========================================================================================================
4채널 기본용어
채널1 - 에일러론 / 헬기일 경우 Roll
채널2 - 엘리베이터 / 헬기일 경우 Nick
채널3 - 스로틀 / 헬기일 경우 Pitch
채널4 - 러더 / 헬기일 경우 Tail
===================================
조금 더 쉬운 설명을 위해서 CCPM 방식이 아닌 일반 방식의 헬기를 기준으로 먼저 설명드리겠습니다.
일반방식의 헬기란 엘리베이터, 에일러론, 자이로, 피치를 담당하는 서보가 각각 하나씩 정해져 있는 헬기를 말합니다.
CCPM 방식은 서보 하나만의 움직임이 아닌, 세개의 서보가 서로 복합적으로 움직이며 제어를 하는 방식인데,
CCPM 방식에 대한 설명은 헬기교실 [4교시] 를 통해 자세히 알려 드리도록 하겠습니다. ^^
6채널 RC헬기들을 보면 날개(블레이드)가 가변피치 방식입니다.
가변피치 방식이라는 의미는 3d(배면비행) 등이 가능하다는 의미입니다.
6채널 가변피치 모델들은 대부분 서보가 4개입니다.
[채널 1번]
==========
에일러론 동일하구요, 에일러론 서보를 담당합니다.
[채널 2번]
==========
엘리베이터 동일하구요, 엘리베이터 서보를 담당합니다.
[채널 3번]
==========
스로틀과 피치 제어를 담당합니다.
채널 3번에서 4채널과 6채널 헬기는 근본적인 차이점이 생기게 되는데..
고정피치 헬기는 스로틀의 가감에 따라 헬기가 상승, 하강할 수 있습니다.
하지만 6채널 가변피치 모델들은 출력과는 상관없이, 만약 블레이드 각도가 0도 (수평상태) 라면 위아래 어떤 방향으로도 힘(추력)이 발생하지 않습니다.
날개각도가 기울어져야만이 그 각도에 따라 힘의 차이가 발생하게 됩니다.
보통 6채널 헬기들은 조종기의 세팅을 통해서 양의 각도와 음의 각도를 10도 ~ -10도 정도로 세팅을 해주게 됩니다.
그런 각도의 변화, 피치 제어에 사용되는 채널은 6번 채널인데, 6번 채널을 따로 조종기로 조작해 주는 것이 아니라,
3번 채널 스로틀 스틱을 올리고 내림에 따라 피치가 같이 제어되게 됩니다.
수신기의 1~6번 채널중 꼽는 곳은 6번 채널이지만, 실제적으로 제어하는 채널은 3번 채널인 셈이지요.
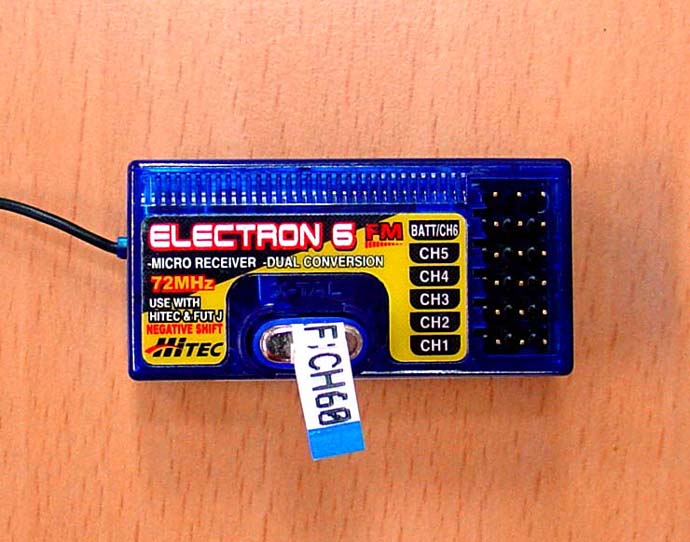
위의 사진은 6채널 전동헬기용으로 많이 사용되는 하이텍 엘렉트론6 수신기의 모습입니다.
그림에서 CH1 ~ CH6 이 잘 보이시죠? ^^
CH1 : 에일러론 (좌우 움직임) 서보를 연결해 줍니다.
CH2 : 엘리베이터 (앞뒤 움직임) 서보를 연결해 줍니다.
CH3 : 전자변속기를 연결해 줍니다.
CH4 : 자이로 (좌우회전 - 꼬리날개 피치제어에 의한 꼬리날개 출력제어) 를 연결해 줍니다.
CH5 : 고급형 자이로에 자이로게인 신호선이 있으면 5번 채널에 연결되는데, 게인선이 없으면 남습니다. ^^
CH6 : 피치 (메인블레이드의 각도를 조절) 서보를 연결해 줍니다.
========================================================================================================
여기에서 스로틀 커브와 피치 커브라는 개념이 발생하게 됩니다.
출력(스로틀)의 세기와 날개 각도의 변화가 유기적으로 서로 잘 맞추어져야 헬기가 잘 날 수 있게 되는데,
서로 궁합이 잘 안 맞을 경우 헬기는 심하게 널뛰기를 하거나 숫체 잘 날지도 못하게 되기도 합니다.
예를 들자면,
6채널 이상 조종기를 보면(옵틱6 이나 후타바 FF9 등등..) 피치 커브와 스로틀 커브를 맞추는 기능이 기본적으로 내장되어 있는데,
각 포인트 (조종기 스틱의 끝에서 끝까지의 범위를 1~5 또는 1~7 포인트로 나누어서 그 포인트별로 1~100퍼센트의 값을 정해줌) 별로 스로틀 퍼센트를 주고, 피치 퍼센트를 주어야 합니다.
스로틀을 100퍼센트로 맞추었다 해도, 피치가 0도에 맞는 퍼센트라면 헬기는 절대 뜰 수가 없겠죠.
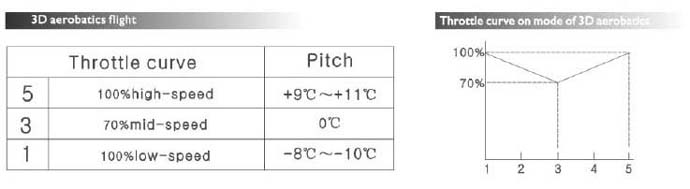
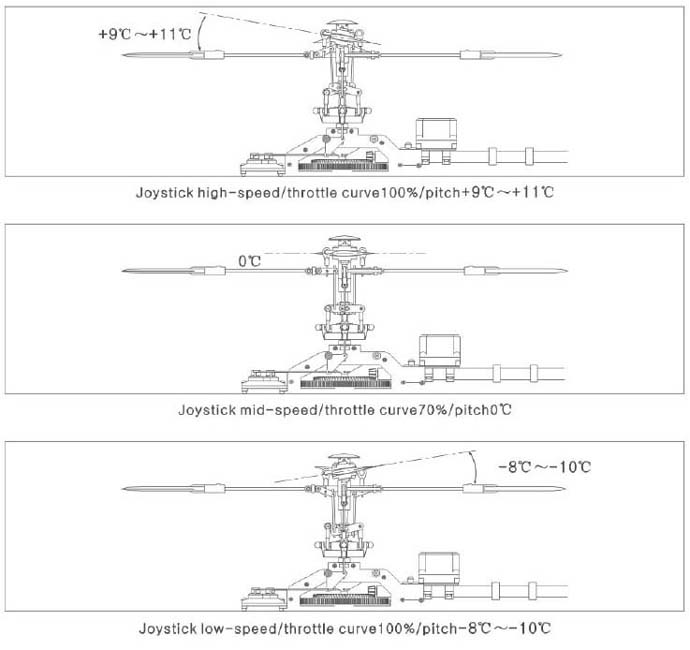
위의 그림은 3d (배면비행)를 위한 스로틀커브와 피치커브 설정을그래프로 나타낸 것입니다.
그래프를 설명 드리자면,
1포인트 (스로틀 스틱이 가장 아래위치) 에 있을때 출력이 100%이며, 3포인트 (스로틀 스틱이 중간지점) 에 있을때 출력이 70%, 5포인트 (스로틀스틱이 가장 높은 위치) 일때 출력 100%임을 나타냅니다.
다시 말씀드리면 그래프에서 보여주는 3d 설정에서는, 스로틀 스틱이 어느 위치에 있건 헬기는 최소한 70% 이상의 출력임을 나타냅니다.
6채널의 경우,
4채널 (고정피치 모델)과 같이 출력의 증감에 따라 힘(추력)이 증감하는 것이 아니라 출력과 함께 피치(각도) 를 제어해 주어야만이 힘을 제어할 수 있게 됩니다.
그래프를 다시금 살펴보면 각 포인트 별로 피치값을 조정해 주어야 함을 알 수 있습니다.
스로틀 스틱이 로우포인트인 1포인트 일 경우 대략 -10도, 하이포인트인 5포인트에서 대략 10도, 중간포인트에서는 0도로 맞추어 준 것을 볼 수 있습니다.
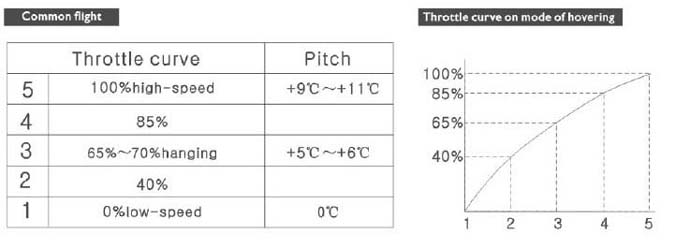
위의 그림은 일반 비행을 위한 스로틀커브 및 피치커브 설정을 그래프로 보여줍니다.
4채널 헬기와 비슷한 특성을 보여주게 됩니다.
스로틀스틱이 1포인트 (로우포인트) 일 경우 출력이 0 이고 5포인트 (하이포인트)일 경우 100%이며, 그에 따른 피치는 1포인트 일때 0도, 5포인트에서 9~11도로 맞추어줌을 보여줍니다.
[채널 4번]
==========
러더를 제어합니다.
4채널의 경우 자이로센서의 값이 직접 변속기를 거쳐 꼬리모터의 출력을 직접 제어하지만,
6채널 이상의 헬기는 자이로센서의 값을 서보가 받아 들이고, 그 서보는 꼬리날개의 피치를 제어함으로써 출력을 제어하게 됩니다.
구조상 4채널헬기는 모터 직접 제어방식이고, 6채널은 꼬리날개 제어방식이 대부분 벨트드라이브 방식입니다.
예전엔 벨트가 아닌 기어를 이용한 기어 드라이브 방식을 많이 사용했었습니다.
[채널 5번]
==========
보통 6채널 헬기 세팅시 남게 됩니다.
고급형 자이로의 경우 자이로게인을 위한 신호선이 하나 더 있는데, 그 신호선을 채널 5번에 꼽게 됩니다.
[채널 6번]
==========
피치 제어를 위한 피치서보에 연결됩니다.
채널 3번에 설명한 것을 참고 하시면 됩니다.
=============================================================
이상으로 4채널과 6채널의 차이점에 대해 말씀을 드렸구요.
구조적인 차이는 날개의 각도가 변하냐 안 변하냐의 차이점에 따라, 그 날개 각도의 변화를 위해 필요한 서보가 하나 더 필요하게 됨으로써 4채널이 아닌 6채널을 기본으로 사용함을 알 수 있습니다.
2채널이나 3채널 모델이라고 말씀드리는 것들은,
4채널의 기본 기능중에 한가지씩이 빠진다고 보시면 됩니다.
예를 들어 라이트헬리 같은 3채널 동축반전 헬기라고 하면, 좌측 우측으로의 움직임 (에일러론)이 아예 없습니다.

기본 4채널 헬기라면 좌측 우측으로의 직접 움직임이 가능한 반면,
3채널 헬기가 좌측으로 가기 위해서는, 90도 좌회전 -> 직진 이라는 형식으로 움직일 수 있게 됩니다.
2채널이라면 그 중에서도 한가지가 더 빠지게 되므로,
거의 오르락 내리락 하는것이 기능의 전부라고 말씀드릴 수 있습니다.
사실상 제어가 불가능합니다. 한번 날리고 나면 떨어질 위치를 날리는 사람도 정할 수 없을 정도로 제어가 어렵게 됩니다. ^^;
이상으로 2채널, 3채널, 4채널, 6채널등에 대한 설명을 마칩니다.
그리고 6채널 헬기에 대한 이해를 조금 더 넓혀보도록 하겠습니다. ^^
우리는 RC헬기에 대해 이야기할 때,
이건 4채널 고정피치 헬기니, 저건 6채널 가변피치 모델이니, 요놈은 3채널 동축반전헬기니 등등, RC헬기가 몇채널 짜리다 라는 말을 많이 하게 됩니다.
이렇게 채널이 많고 적음에 따른 헬기의 차이점은 무엇일까요?? ^^
========================================================================================================
4채널 기본용어
채널1 - 에일러론 / 헬기일 경우 Roll
채널2 - 엘리베이터 / 헬기일 경우 Nick
채널3 - 스로틀 / 헬기일 경우 Pitch
채널4 - 러더 / 헬기일 경우 Tail
===================================
조금 더 쉬운 설명을 위해서 CCPM 방식이 아닌 일반 방식의 헬기를 기준으로 먼저 설명드리겠습니다.
일반방식의 헬기란 엘리베이터, 에일러론, 자이로, 피치를 담당하는 서보가 각각 하나씩 정해져 있는 헬기를 말합니다.
CCPM 방식은 서보 하나만의 움직임이 아닌, 세개의 서보가 서로 복합적으로 움직이며 제어를 하는 방식인데,
CCPM 방식에 대한 설명은 헬기교실 [4교시] 를 통해 자세히 알려 드리도록 하겠습니다. ^^
6채널 RC헬기들을 보면 날개(블레이드)가 가변피치 방식입니다.
가변피치 방식이라는 의미는 3d(배면비행) 등이 가능하다는 의미입니다.
6채널 가변피치 모델들은 대부분 서보가 4개입니다.
[채널 1번]
==========
에일러론 동일하구요, 에일러론 서보를 담당합니다.
[채널 2번]
==========
엘리베이터 동일하구요, 엘리베이터 서보를 담당합니다.
[채널 3번]
==========
스로틀과 피치 제어를 담당합니다.
채널 3번에서 4채널과 6채널 헬기는 근본적인 차이점이 생기게 되는데..
고정피치 헬기는 스로틀의 가감에 따라 헬기가 상승, 하강할 수 있습니다.
하지만 6채널 가변피치 모델들은 출력과는 상관없이, 만약 블레이드 각도가 0도 (수평상태) 라면 위아래 어떤 방향으로도 힘(추력)이 발생하지 않습니다.
날개각도가 기울어져야만이 그 각도에 따라 힘의 차이가 발생하게 됩니다.
보통 6채널 헬기들은 조종기의 세팅을 통해서 양의 각도와 음의 각도를 10도 ~ -10도 정도로 세팅을 해주게 됩니다.
그런 각도의 변화, 피치 제어에 사용되는 채널은 6번 채널인데, 6번 채널을 따로 조종기로 조작해 주는 것이 아니라,
3번 채널 스로틀 스틱을 올리고 내림에 따라 피치가 같이 제어되게 됩니다.
수신기의 1~6번 채널중 꼽는 곳은 6번 채널이지만, 실제적으로 제어하는 채널은 3번 채널인 셈이지요.
위의 사진은 6채널 전동헬기용으로 많이 사용되는 하이텍 엘렉트론6 수신기의 모습입니다.
그림에서 CH1 ~ CH6 이 잘 보이시죠? ^^
CH1 : 에일러론 (좌우 움직임) 서보를 연결해 줍니다.
CH2 : 엘리베이터 (앞뒤 움직임) 서보를 연결해 줍니다.
CH3 : 전자변속기를 연결해 줍니다.
CH4 : 자이로 (좌우회전 - 꼬리날개 피치제어에 의한 꼬리날개 출력제어) 를 연결해 줍니다.
CH5 : 고급형 자이로에 자이로게인 신호선이 있으면 5번 채널에 연결되는데, 게인선이 없으면 남습니다. ^^
CH6 : 피치 (메인블레이드의 각도를 조절) 서보를 연결해 줍니다.
========================================================================================================
여기에서 스로틀 커브와 피치 커브라는 개념이 발생하게 됩니다.
출력(스로틀)의 세기와 날개 각도의 변화가 유기적으로 서로 잘 맞추어져야 헬기가 잘 날 수 있게 되는데,
서로 궁합이 잘 안 맞을 경우 헬기는 심하게 널뛰기를 하거나 숫체 잘 날지도 못하게 되기도 합니다.
예를 들자면,
6채널 이상 조종기를 보면(옵틱6 이나 후타바 FF9 등등..) 피치 커브와 스로틀 커브를 맞추는 기능이 기본적으로 내장되어 있는데,
각 포인트 (조종기 스틱의 끝에서 끝까지의 범위를 1~5 또는 1~7 포인트로 나누어서 그 포인트별로 1~100퍼센트의 값을 정해줌) 별로 스로틀 퍼센트를 주고, 피치 퍼센트를 주어야 합니다.
스로틀을 100퍼센트로 맞추었다 해도, 피치가 0도에 맞는 퍼센트라면 헬기는 절대 뜰 수가 없겠죠.
위의 그림은 3d (배면비행)를 위한 스로틀커브와 피치커브 설정을그래프로 나타낸 것입니다.
그래프를 설명 드리자면,
1포인트 (스로틀 스틱이 가장 아래위치) 에 있을때 출력이 100%이며, 3포인트 (스로틀 스틱이 중간지점) 에 있을때 출력이 70%, 5포인트 (스로틀스틱이 가장 높은 위치) 일때 출력 100%임을 나타냅니다.
다시 말씀드리면 그래프에서 보여주는 3d 설정에서는, 스로틀 스틱이 어느 위치에 있건 헬기는 최소한 70% 이상의 출력임을 나타냅니다.
6채널의 경우,
4채널 (고정피치 모델)과 같이 출력의 증감에 따라 힘(추력)이 증감하는 것이 아니라 출력과 함께 피치(각도) 를 제어해 주어야만이 힘을 제어할 수 있게 됩니다.
그래프를 다시금 살펴보면 각 포인트 별로 피치값을 조정해 주어야 함을 알 수 있습니다.
스로틀 스틱이 로우포인트인 1포인트 일 경우 대략 -10도, 하이포인트인 5포인트에서 대략 10도, 중간포인트에서는 0도로 맞추어 준 것을 볼 수 있습니다.
위의 그림은 일반 비행을 위한 스로틀커브 및 피치커브 설정을 그래프로 보여줍니다.
4채널 헬기와 비슷한 특성을 보여주게 됩니다.
스로틀스틱이 1포인트 (로우포인트) 일 경우 출력이 0 이고 5포인트 (하이포인트)일 경우 100%이며, 그에 따른 피치는 1포인트 일때 0도, 5포인트에서 9~11도로 맞추어줌을 보여줍니다.
[채널 4번]
==========
러더를 제어합니다.
4채널의 경우 자이로센서의 값이 직접 변속기를 거쳐 꼬리모터의 출력을 직접 제어하지만,
6채널 이상의 헬기는 자이로센서의 값을 서보가 받아 들이고, 그 서보는 꼬리날개의 피치를 제어함으로써 출력을 제어하게 됩니다.
구조상 4채널헬기는 모터 직접 제어방식이고, 6채널은 꼬리날개 제어방식이 대부분 벨트드라이브 방식입니다.
예전엔 벨트가 아닌 기어를 이용한 기어 드라이브 방식을 많이 사용했었습니다.
[채널 5번]
==========
보통 6채널 헬기 세팅시 남게 됩니다.
고급형 자이로의 경우 자이로게인을 위한 신호선이 하나 더 있는데, 그 신호선을 채널 5번에 꼽게 됩니다.
[채널 6번]
==========
피치 제어를 위한 피치서보에 연결됩니다.
채널 3번에 설명한 것을 참고 하시면 됩니다.
=============================================================
이상으로 4채널과 6채널의 차이점에 대해 말씀을 드렸구요.
구조적인 차이는 날개의 각도가 변하냐 안 변하냐의 차이점에 따라, 그 날개 각도의 변화를 위해 필요한 서보가 하나 더 필요하게 됨으로써 4채널이 아닌 6채널을 기본으로 사용함을 알 수 있습니다.
2채널이나 3채널 모델이라고 말씀드리는 것들은,
4채널의 기본 기능중에 한가지씩이 빠진다고 보시면 됩니다.
예를 들어 라이트헬리 같은 3채널 동축반전 헬기라고 하면, 좌측 우측으로의 움직임 (에일러론)이 아예 없습니다.
기본 4채널 헬기라면 좌측 우측으로의 직접 움직임이 가능한 반면,
3채널 헬기가 좌측으로 가기 위해서는, 90도 좌회전 -> 직진 이라는 형식으로 움직일 수 있게 됩니다.
2채널이라면 그 중에서도 한가지가 더 빠지게 되므로,
거의 오르락 내리락 하는것이 기능의 전부라고 말씀드릴 수 있습니다.
사실상 제어가 불가능합니다. 한번 날리고 나면 떨어질 위치를 날리는 사람도 정할 수 없을 정도로 제어가 어렵게 됩니다. ^^;
이상으로 2채널, 3채널, 4채널, 6채널등에 대한 설명을 마칩니다.
[출처] 4채널과 6채널 RC헬기의 차이점 및 6채널 헬기의 기초이해|작성자 엑스캅터
'일상생활 > 취미' 카테고리의 다른 글
| 무선헬기의 오토로테이션 (Auto Rotation) 이란? (0) | 2009.09.09 |
|---|---|
| FMS(Flying Model Simulator) 를 즐기자 - Alpha 8.5 한글 엑스캅터 버전 (0) | 2009.09.09 |
| RC헬기 조종기 채널 설명 - 에일러론, 엘리베이터, 스로틀, 러더 (0) | 2009.09.09 |
| 안전과 직결되는 꼭 지켜야 할 사항 (0) | 2009.09.09 |
| 모형헬기 급수별 크기 비교 (0) | 2009.09.09 |